Learning Sensory-Motor Associations from Demonstration
2020
Conference Paper
am
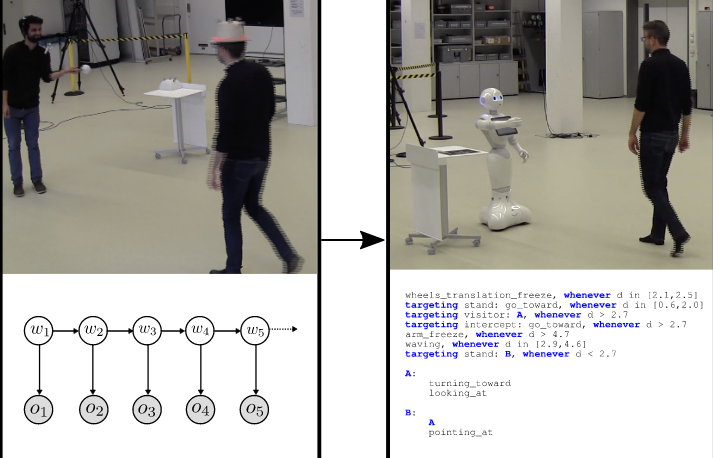
We propose a method which generates reactive robot behavior learned from human demonstration. In order to do so, we use the Playful programming language which is based on the reactive programming paradigm. This allows us to represent the learned behavior as a set of associations between sensor and motor primitives in a human readable script. Distinguishing between sensor and motor primitives introduces a supplementary level of granularity and more importantly enforces feedback, increasing adaptability and robustness. As the experimental section shows, useful behaviors may be learned from a single demonstration covering a very limited portion of the task space.
| Author(s): | Vincent Berenz and Ahmed Bjelic and Lahiru Herath and Jim Mainprice |
| Year: | 2020 |
| Month: | August |
| Department(s): | Autonomous Motion |
| Bibtex Type: | Conference Paper (conference) |
| Paper Type: | Conference |
| Event Name: | 29th IEEE International Conference on Robot and Human Interactive Communication (Ro-Man 2020) |
| Event Place: | Online |
| State: | Published |
|
BibTex @conference{berenz_sensory_motor_demo,
title = {Learning Sensory-Motor Associations from Demonstration},
author = {Berenz, Vincent and Bjelic, Ahmed and Herath, Lahiru and Mainprice, Jim},
month = aug,
year = {2020},
doi = {},
month_numeric = {8}
}
|
|