
2023
Dhédin, V., Li, H., Khorshidi, S., Mack, L., Ravi, A. K. C., Meduri, A., Shah, P., Grimminger, F., Righetti, L., Khadiv, M., Stueckler, J.
Visual-Inertial and Leg Odometry Fusion for Dynamic Locomotion
In Accepted for IEEE International Conference on Robotics and Automation (ICRA), arXiv:2210.02127, 2023 (inproceedings) Accepted

2021
Yi, B. L. M. A. K. A. M. R. B. J.
Differentiable Factor Graph Optimization for Learning Smoothers
Proceedings 2021 IEEE/RSJ INTERNATIONAL CONFERENCE ON INTELLIGENT ROBOTS AND SYSTEMS (IROS), pages: 1339-1345, IEEE, IROS 2021, September 2021 (conference)
Leziart, P. F. T. G. F. M. N. S. P.
Implementation of a Reactive Walking Controller for the New Open-Hardware Quadruped Solo-12
Proceedings IEEE International Conference on Robotics and Automation (ICRA), pages: 5007-5013, IEEE, IEEE International Conference on Robotics and Automation (ICRA), June 2021 (conference)
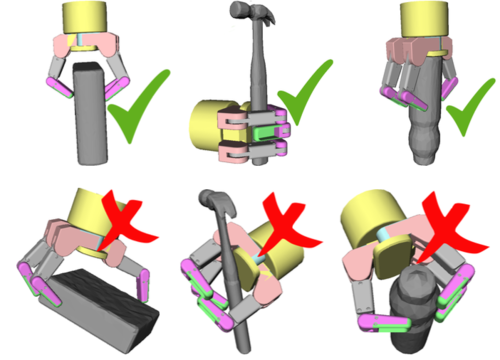
Hager, J., Bauer, R., Toussaint, M., Mainprice, J.
GraspME - Grasp Manifold Estimator
In 2021 30th IEEE International Conference on Robot and Human Interactive Communication (RO-MAN 2021), pages: 626-632, IEEE, Piscataway, NJ, 30th IEEE International Conference on Robot and Human Interactive Communication (RO-MAN 2021) , 2021 (inproceedings)
Oh, Y., Schäfer, T., Rüther, B., Toussaint, M., Mainprice, J.
A System for Traded Control Teleoperation of Manipulation Tasks using Intent Prediction from Hand Gestures
In 2021 30th IEEE International Conference on Robot and Human Interactive Communication (RO-MAN 2021), pages: 503-508, IEEE, Piscataway, NJ, 30th IEEE International Conference on Robot and Human Interactive Communication (RO-MAN 2021), 2021 (inproceedings)
Le, A. T., Kratzer, P., Hagenmayer, S., Toussaint, M., Mainprice, J.
Hierarchical Human-Motion Prediction and Logic-Geometric Programming for Minimal Interference Human-Robot Tasks
In 2021 30th IEEE International Conference on Robot and Human Interactive Communication (RO-MAN 2021) , pages: 7-14, IEEE, Piscataway, NJ, 30th IEEE International Conference on Robot and Human Interactive Communication (RO-MAN 2021), 2021 (inproceedings)
Oh, Y., Toussaint, M., Mainprice, J.
Learning to Arbitrate Human and Robot Control using Disagreement between Sub-Policies
In 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2021), pages: 5305-5311, IEEE, Piscataway, NJ, IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2021), 2021 (inproceedings)
2020
Wüthrich, M., Widmaier, F., Grimminger, F., Akpo, J., Joshi, S., Agrawal, V., Hammoud, B., Khadiv, M., Bogdanovic, M., Berenz, V., Viereck, J., Naveau, M., Righetti, L., Schölkopf, B., Bauer, S.
TriFinger: An Open-Source Robot for Learning Dexterity
Proceedings of the 4th Conference on Robot Learning (CoRL), 155, pages: 1871-1882, Proceedings of Machine Learning Research, (Editors: Jens Kober and Fabio Ramos and Claire J. Tomlin), PMLR, November 2020 (conference)
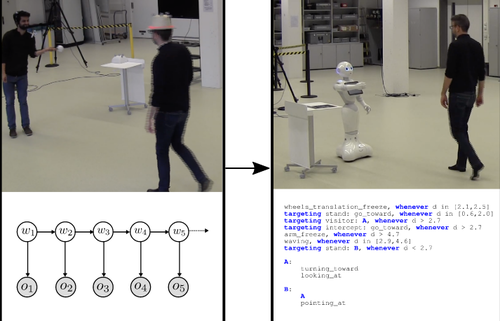
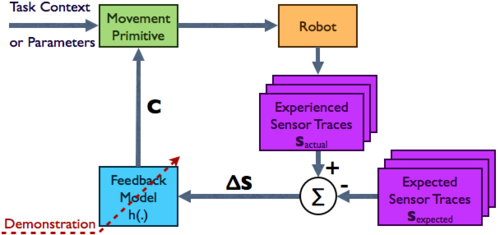
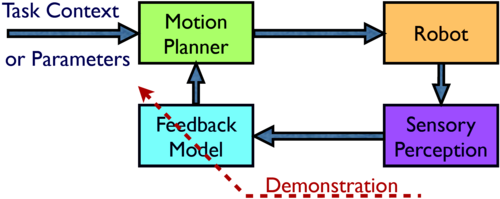
Berenz, V., Bjelic, A., Herath, L., Mainprice, J.
Learning Sensory-Motor Associations from Demonstration
29th IEEE International Conference on Robot and Human Interactive Communication (Ro-Man 2020), August 2020 (conference)
Kloss, A., Bauza, M., Wu, J., Tenenbaum, J. B., Rodriguez, A., Bohg, J.
Accurate Vision-based Manipulation through Contact Reasoning
In International Conference on Robotics and Automation, May 2020 (inproceedings) Accepted
Agudelo-España, D., Zadaianchuk, A., Wenk, P., Garg, A., Akpo, J., Grimminger, F., Viereck, J., Naveau, M., Righetti, L., Martius, G., Krause, A., Schölkopf, B., Bauer, S., Wüthrich, M.
A Real-Robot Dataset for Assessing Transferability of Learned Dynamics Models
IEEE International Conference on Robotics and Automation (ICRA), pages: 8151-8157, IEEE, 2020 (conference)
Mainprice, J., Ratliff, N., Toussaint, M., Schaal, S.
An Interior Point Method Solving Motion Planning Problems with Narrow Passages
In 2020 29th IEEE International Conference on Robot and Human Interactive Communication (RO-MAN 2020), pages: 547-552, IEEE, Piscataway, NJ, 29th IEEE International Conference on Robot and Human Interactive Communication (RO-MAN 2020), 2020 (inproceedings)
Kratzer, P., Toussaint, M., Mainprice, J.
Prediction of Human Full-Body Movements with Motion Optimization and Recurrent Neural Networks
In 2020 IEEE International Conference on Robotics and Automation (ICRA 2020), pages: 1792-1798, IEEE, Piscataway, NJ, IEEE International Conference on Robotics and Automation (ICRA 2020), 2020 (inproceedings)
2019
Gondal, M. W., Wüthrich, M., Miladinovic, D., Locatello, F., Breidt, M., Volchkov, V., Akpo, J., Bachem, O., Schölkopf, B., Bauer, S.
On the Transfer of Inductive Bias from Simulation to the Real World: a New Disentanglement Dataset
Advances in Neural Information Processing Systems 32 (NeurIPS 2019), pages: 15714-15725, (Editors: H. Wallach and H. Larochelle and A. Beygelzimer and F. d’Alché-Buc and E. Fox and R. Garnett), Curran Associates, Inc., 33rd Annual Conference on Neural Information Processing Systems, December 2019 (conference)
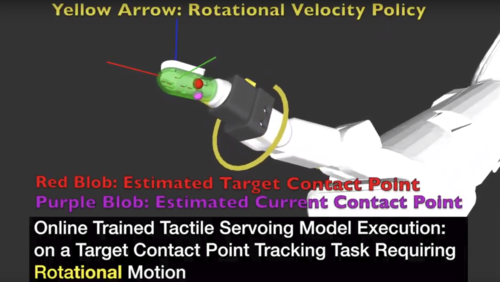
Sutanto, G., Ratliff, N., Sundaralingam, B., Chebotar, Y., Su, Z., Handa, A., Fox, D.
Learning Latent Space Dynamics for Tactile Servoing
In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA) 2019, IEEE, International Conference on Robotics and Automation, May 2019 (inproceedings) Accepted
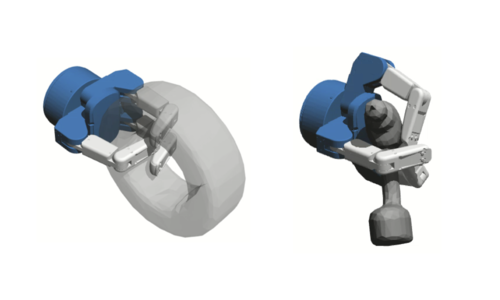
Merzic, H., Bogdanovic, M., Kappler, D., Righetti, L., Bohg, J.
Leveraging Contact Forces for Learning to Grasp
In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA) 2019, IEEE, International Conference on Robotics and Automation, May 2019 (inproceedings)
2018
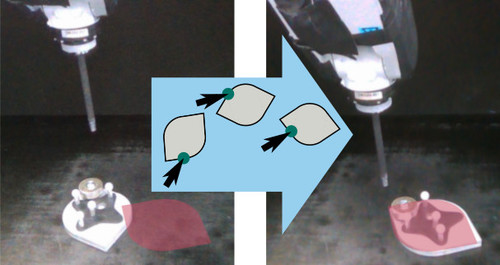
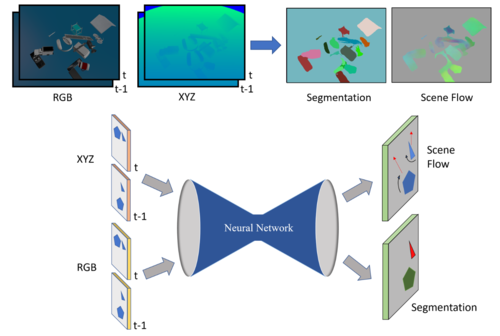
Shao, L., Shah, P., Dwaracherla, V., Bohg, J.
Motion-based Object Segmentation based on Dense RGB-D Scene Flow
IEEE Robotics and Automation Letters, 3(4):3797-3804, IEEE, IEEE/RSJ International Conference on Intelligent Robots and Systems, October 2018 (conference)
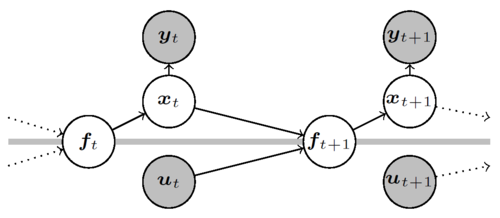
Doerr, A., Daniel, C., Schiegg, M., Nguyen-Tuong, D., Schaal, S., Toussaint, M., Trimpe, S.
Probabilistic Recurrent State-Space Models
In Proceedings of the International Conference on Machine Learning (ICML), International Conference on Machine Learning (ICML), July 2018 (inproceedings)
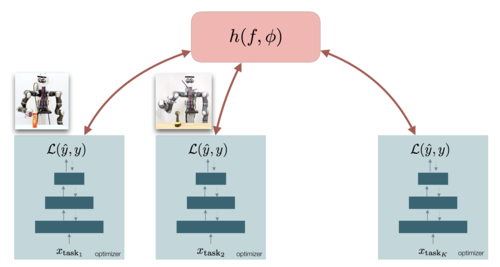
Meier, F., Kappler, D., Schaal, S.
Online Learning of a Memory for Learning Rates
In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA) 2018, IEEE, International Conference on Robotics and Automation, May 2018, accepted (inproceedings)
Sutanto, G., Su, Z., Schaal, S., Meier, F.
Learning Sensor Feedback Models from Demonstrations via Phase-Modulated Neural Networks
In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA) 2018, IEEE, International Conference on Robotics and Automation, May 2018 (inproceedings)
Ponton, B., Herzog, A., Del Prete, A., Schaal, S., Righetti, L.
On Time Optimization of Centroidal Momentum Dynamics
In 2018 IEEE International Conference on Robotics and Automation (ICRA), pages: 5776-5782, IEEE, Brisbane, Australia, 2018 (inproceedings)
Rotella, N., Schaal, S., Righetti, L.
Unsupervised Contact Learning for Humanoid Estimation and Control
In 2018 IEEE International Conference on Robotics and Automation (ICRA), pages: 411-417, IEEE, Brisbane, Australia, 2018 (inproceedings)
Gams, A., Mason, S., Ude, A., Schaal, S., Righetti, L.
Learning Task-Specific Dynamics to Improve Whole-Body Control
In Hua, IEEE, Beijing, China, November 2018 (inproceedings)
Mason, S., Rotella, N., Schaal, S., Righetti, L.
An MPC Walking Framework With External Contact Forces
In 2018 IEEE International Conference on Robotics and Automation (ICRA), pages: 1785-1790, IEEE, Brisbane, Australia, May 2018 (inproceedings)
2017
Hausman, K., Chebotar, Y., Schaal, S., Sukhatme, G., Lim, J.
Multi-Modal Imitation Learning from Unstructured Demonstrations using Generative Adversarial Nets
In Proceedings from the conference "Neural Information Processing Systems 2017., (Editors: Guyon I. and Luxburg U.v. and Bengio S. and Wallach H. and Fergus R. and Vishwanathan S. and Garnett R.), Curran Associates, Inc., Advances in Neural Information Processing Systems 30 (NIPS), December 2017 (inproceedings)
Marco, A., Hennig, P., Schaal, S., Trimpe, S.
On the Design of LQR Kernels for Efficient Controller Learning
Proceedings of the 56th IEEE Annual Conference on Decision and Control (CDC), pages: 5193-5200, IEEE, IEEE Conference on Decision and Control, December 2017 (conference)
Doerr, A., Daniel, C., Nguyen-Tuong, D., Marco, A., Schaal, S., Toussaint, M., Trimpe, S.
Optimizing Long-term Predictions for Model-based Policy Search
Proceedings of 1st Annual Conference on Robot Learning (CoRL), 78, pages: 227-238, (Editors: Sergey Levine and Vincent Vanhoucke and Ken Goldberg), 1st Annual Conference on Robot Learning, November 2017 (conference)
Heijmink, E., Radulescu, A., Ponton, B., Barasuol, V., Caldwell, D., Semini, C.
Learning optimal gait parameters and impedance profiles for legged locomotion
Proceedings International Conference on Humanoid Robots, IEEE, 2017 IEEE-RAS 17th International Conference on Humanoid Robots, November 2017 (conference)
Kappler, D., Meier, F., Ratliff, N., Schaal, S.
A New Data Source for Inverse Dynamics Learning
In Proceedings IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), IEEE, Piscataway, NJ, USA, IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), September 2017 (inproceedings)
Fiebig, K., Jayaram, V., Hesse, T., Blank, A., Peters, J., Grosse-Wentrup, M.
Bayesian Regression for Artifact Correction in Electroencephalography
Proceedings of the 7th Graz Brain-Computer Interface Conference 2017 - From Vision to Reality, pages: 131-136, (Editors: Müller-Putz G.R., Steyrl D., Wriessnegger S. C., Scherer R.), Graz University of Technology, Austria, Graz Brain-Computer Interface Conference, September 2017 (conference)
Grossberger, L., Hohmann, M. R., Peters, J., Grosse-Wentrup, M.
Investigating Music Imagery as a Cognitive Paradigm for Low-Cost Brain-Computer Interfaces
Proceedings of the 7th Graz Brain-Computer Interface Conference 2017 - From Vision to Reality, pages: 160-164, (Editors: Müller-Putz G.R., Steyrl D., Wriessnegger S. C., Scherer R.), Graz University of Technology, Austria, Graz Brain-Computer Interface Conference, September 2017 (conference)
Rubert, C., Kappler, D., Morales, A., Schaal, S., Bohg, J.
On the relevance of grasp metrics for predicting grasp success
In Proceedings of the IEEE/RSJ International Conference of Intelligent Robots and Systems, September 2017 (inproceedings) Accepted
Akrour, R., Sorokin, D., Peters, J., Neumann, G.
Local Bayesian Optimization of Motor Skills
Proceedings of the 34th International Conference on Machine Learning (ICML), 70, pages: 41-50, Proceedings of Machine Learning Research, (Editors: Doina Precup, Yee Whye Teh), PMLR, August 2017 (conference)
Chebotar, Y., Hausman, K., Zhang, M., Sukhatme, G., Schaal, S., Levine, S.
Combining Model-Based and Model-Free Updates for Trajectory-Centric Reinforcement Learning
Proceedings of the 34th International Conference on Machine Learning, 70, Proceedings of Machine Learning Research, (Editors: Doina Precup, Yee Whye Teh), PMLR, International Conference on Machine Learning (ICML), August 2017 (conference)
Doerr, A., Nguyen-Tuong, D., Marco, A., Schaal, S., Trimpe, S.
Model-Based Policy Search for Automatic Tuning of Multivariate PID Controllers
In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), pages: 5295-5301, IEEE, Piscataway, NJ, USA, IEEE International Conference on Robotics and Automation (ICRA), May 2017 (inproceedings)
Rai, A., Sutanto, G., Schaal, S., Meier, F.
Learning Feedback Terms for Reactive Planning and Control
Proceedings 2017 IEEE International Conference on Robotics and Automation (ICRA), IEEE, Piscataway, NJ, USA, IEEE International Conference on Robotics and Automation (ICRA), May 2017 (conference)
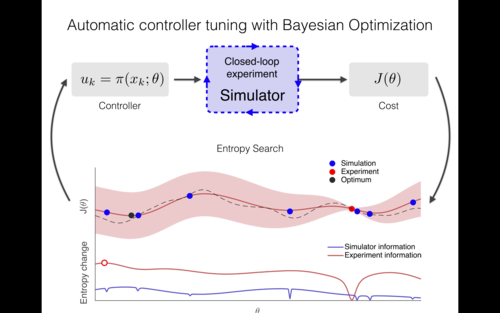
Marco, A., Berkenkamp, F., Hennig, P., Schoellig, A. P., Krause, A., Schaal, S., Trimpe, S.
Virtual vs. Real: Trading Off Simulations and Physical Experiments in Reinforcement Learning with Bayesian Optimization
In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), pages: 1557-1563, IEEE, Piscataway, NJ, USA, May 2017 (inproceedings)
Chebotar, Y., Kalakrishnan, M., Yahya, A., Li, A., Schaal, S., Levine, S.
Path Integral Guided Policy Search
Proceedings 2017 IEEE International Conference on Robotics and Automation (ICRA), IEEE, Piscataway, NJ, USA, IEEE International Conference on Robotics and Automation (ICRA), May 2017 (conference)
2016
Trimpe, S.
Predictive and Self Triggering for Event-based State Estimation
In Proceedings of the 55th IEEE Conference on Decision and Control (CDC), pages: 3098-3105, Las Vegas, NV, USA, December 2016 (inproceedings)
Gomez-Gonzalez, S., Neumann, G., Schölkopf, B., Peters, J.
Using Probabilistic Movement Primitives for Striking Movements
16th IEEE-RAS International Conference on Humanoid Robots (Humanoids), pages: 502-508, November 2016 (conference)

Huang, Y., Büchler, D., Koc, O., Schölkopf, B., Peters, J.
Jointly Learning Trajectory Generation and Hitting Point Prediction in Robot Table Tennis
16th IEEE-RAS International Conference on Humanoid Robots (Humanoids), pages: 650-655, November 2016 (conference)
The Role of Measurement Uncertainty in Optimal Control for Contact Interactions
Workshop on the Algorithmic Foundations of Robotics, pages: 22, November 2016 (conference)
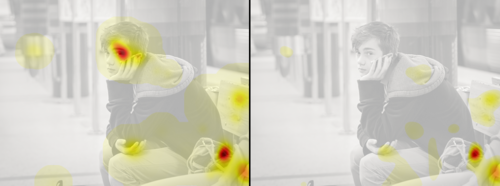
Kloss, A., Kappler, D., Lensch, H. P. A., Butz, M. V., Schaal, S., Bohg, J.
Learning Where to Search Using Visual Attention
Proceedings of the IEEE/RSJ Conference on Intelligent Robots and Systems, IEEE, IROS, October 2016 (conference)
Sankaran, B., Ramalingam, S., Taguchi, Y.
Parameter Learning for Improving Binary Descriptor Matching
In International Conference on Intelligent Robots and Systems (IROS) 2016, IEEE/RSJ International Conference on Intelligent Robots and Systems, October 2016 (inproceedings)
Koc, O., Maeda, G., Peters, J.
A New Trajectory Generation Framework in Robotic Table Tennis
Proceedings of the IEEE/RSJ Conference on Intelligent Robots and Systems (IROS), pages: 3750-3756, October 2016 (conference)
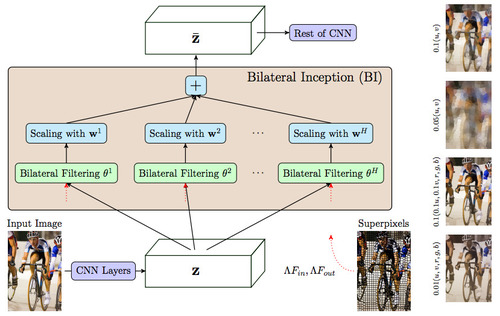
Gadde, R., Jampani, V., Kiefel, M., Kappler, D., Gehler, P.
Superpixel Convolutional Networks using Bilateral Inceptions
In European Conference on Computer Vision (ECCV), Lecture Notes in Computer Science, Springer, 14th European Conference on Computer Vision, October 2016 (inproceedings)

Lassner, C., Kappler, D., Kiefel, M., Gehler, P.
Barrista - Caffe Well-Served
In ACM Multimedia Open Source Software Competition, ACM OSSC16, October 2016 (inproceedings)
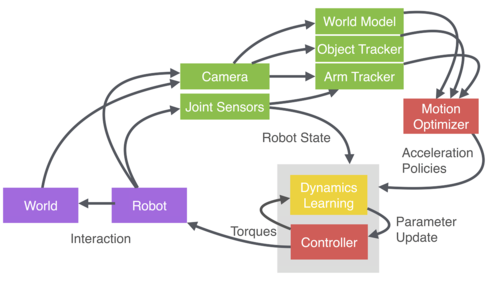
Bohg, J., Kappler, D., Meier, F., Ratliff, N., Mainprice, J., Issac, J., Wüthrich, M., Garcia Cifuentes, C., Berenz, V., Schaal, S.
Interlocking Perception-Action Loops at Multiple Time Scales - A System Proposal for Manipulation in Uncertain and Dynamic Environments
In International Workshop on Robotics in the 21st century: Challenges and Promises, September 2016 (inproceedings)
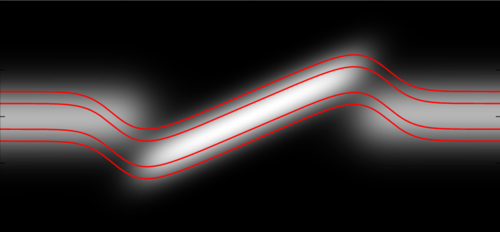
Wüthrich, M., Garcia Cifuentes, C., Trimpe, S., Meier, F., Bohg, J., Issac, J., Schaal, S.
Robust Gaussian Filtering using a Pseudo Measurement
In Proceedings of the American Control Conference (ACC), Boston, MA, USA, July 2016 (inproceedings)
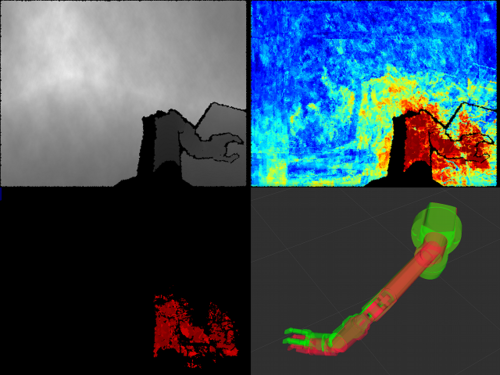
Widmaier, F., Kappler, D., Schaal, S., Bohg, J.
Robot Arm Pose Estimation by Pixel-wise Regression of Joint Angles
In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA) 2016, IEEE, IEEE International Conference on Robotics and Automation, May 2016 (inproceedings)