2020
Marco, A., Rohr, A. V., Baumann, D., Hernández-Lobato, J. M., Trimpe, S.
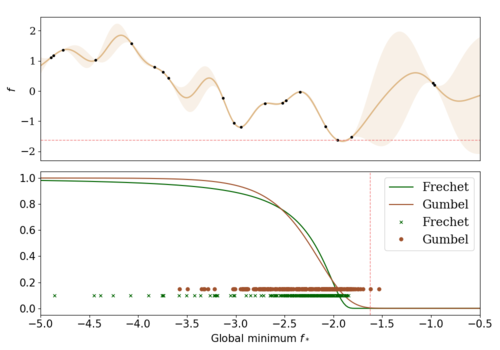
Excursion Search for Constrained Bayesian Optimization under a Limited Budget of Failures
2020 (proceedings) In revision

2016
Oh, Y., Sutanto, G., Mistry, M., Schweighofer, N., Schaal, S.
Distinct adaptation to abrupt and gradual torque perturbations with a multi-joint exoskeleton robot
Abstracts of Neural Control of Movement Conference (NCM 2016), Montego Bay, Jamaica, April 2016 (poster)
2012
2011
2006
Berenz, V., Tillier, F., Barbosa, F., Boryeu, M., Horvath, D., Froloff, N.
Molecular Modeling for the BioPrint Pharmaco-informatics Platform
2006 (poster)