ClusterNet: Instance Segmentation in RGB-D Images
2018
Article
am
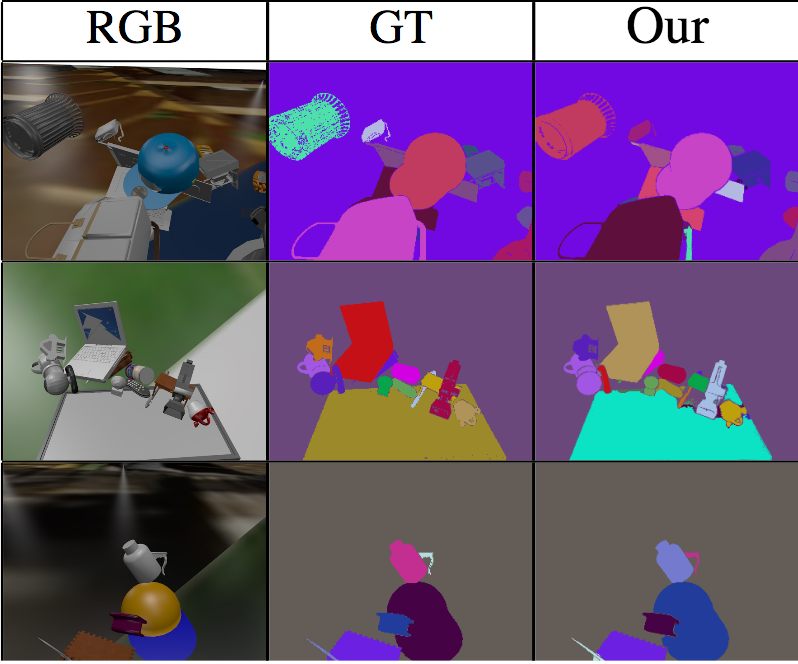
We propose a method for instance-level segmentation that uses RGB-D data as input and provides detailed information about the location, geometry and number of {\em individual\/} objects in the scene. This level of understanding is fundamental for autonomous robots. It enables safe and robust decision-making under the large uncertainty of the real-world. In our model, we propose to use the first and second order moments of the object occupancy function to represent an object instance. We train an hourglass Deep Neural Network (DNN) where each pixel in the output votes for the 3D position of the corresponding object center and for the object's size and pose. The final instance segmentation is achieved through clustering in the space of moments. The object-centric training loss is defined on the output of the clustering. Our method outperforms the state-of-the-art instance segmentation method on our synthesized dataset. We show that our method generalizes well on real-world data achieving visually better segmentation results.
| Author(s): | Lin Shao and Ye Tian and Jeannette Bohg |
| Journal: | arXiv |
| Year: | 2018 |
| Month: | September |
| Department(s): | Autonomous Motion |
| Bibtex Type: | Article (article) |
| Paper Type: | Conference |
| Note: | Submitted to ICRA'19 |
| State: | Submitted |
| URL: | https://arxiv.org/abs/1807.08894 |
|
BibTex @article{2019_ICRA_instSeg,
title = {ClusterNet: Instance Segmentation in RGB-D Images},
author = {Shao, Lin and Tian, Ye and Bohg, Jeannette},
journal = {arXiv},
month = sep,
year = {2018},
note = {Submitted to ICRA'19},
doi = {},
url = {https://arxiv.org/abs/1807.08894},
month_numeric = {9}
}
|
|