Robot Arm Pose Estimation through Pixel-Wise Part Classification
2014
Conference Paper
am
ps
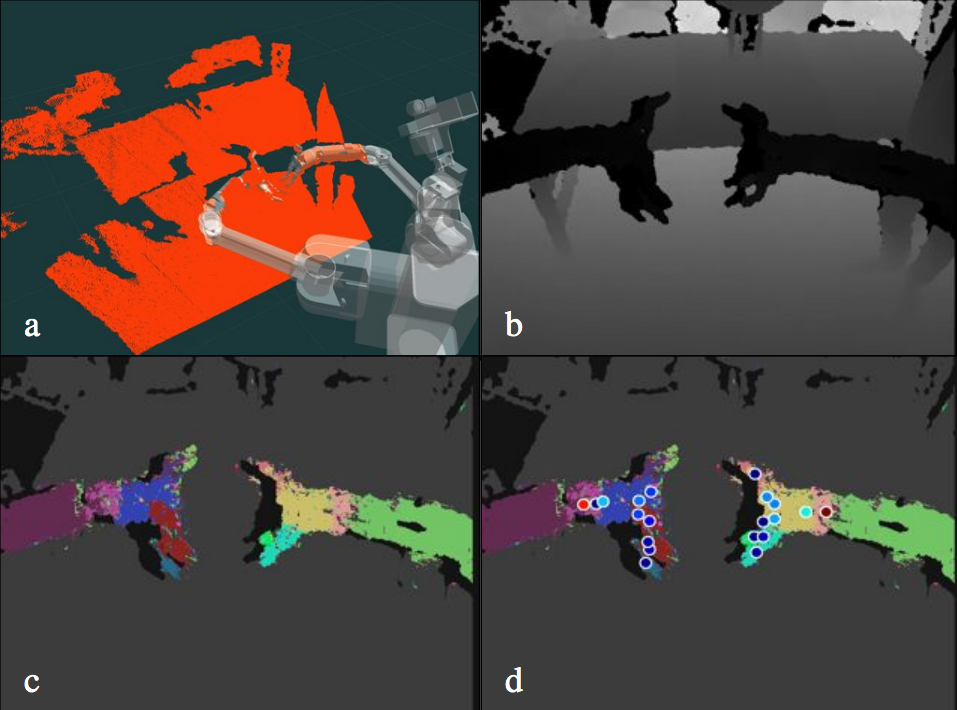
We propose to frame the problem of marker-less robot arm pose estimation as a pixel-wise part classification problem. As input, we use a depth image in which each pixel is classified to be either from a particular robot part or the background. The classifier is a random decision forest trained on a large number of synthetically generated and labeled depth images. From all the training samples ending up at a leaf node, a set of offsets is learned that votes for relative joint positions. Pooling these votes over all foreground pixels and subsequent clustering gives us an estimate of the true joint positions. Due to the intrinsic parallelism of pixel-wise classification, this approach can run in super real-time and is more efficient than previous ICP-like methods. We quantitatively evaluate the accuracy of this approach on synthetic data. We also demonstrate that the method produces accurate joint estimates on real data despite being purely trained on synthetic data.
| Author(s): | Jeannette Bohg and Javier Romero and Alexander Herzog and Stefan Schaal |
| Book Title: | IEEE International Conference on Robotics and Automation (ICRA) 2014 |
| Pages: | 3143--3150 |
| Year: | 2014 |
| Month: | June |
| Department(s): | Autonomous Motion, Perceiving Systems |
| Research Project(s): |
Robot Arm Pose Estimation as a Learning Problem
|
| Bibtex Type: | Conference Paper (inproceedings) |
| Paper Type: | Conference |
| DOI: | 10.1109/ICRA.2014.6907311 |
| Event Name: | IEEE International Conference on Robotics and Automation (ICRA) 2014 |
| Event Place: | Hong Kong, China |
| Links: |
video
code |
| Video: | |
| Attachments: |
pdf
|
|
BibTex @inproceedings{2014_ICRA_brhs,
title = {Robot Arm Pose Estimation through Pixel-Wise Part Classification},
author = {Bohg, Jeannette and Romero, Javier and Herzog, Alexander and Schaal, Stefan},
booktitle = {IEEE International Conference on Robotics and Automation (ICRA) 2014},
pages = {3143--3150},
month = jun,
year = {2014},
doi = {10.1109/ICRA.2014.6907311},
month_numeric = {6}
}
|
|