Robot Arm Pose Estimation by Pixel-wise Regression of Joint Angles
2016
Conference Paper
am
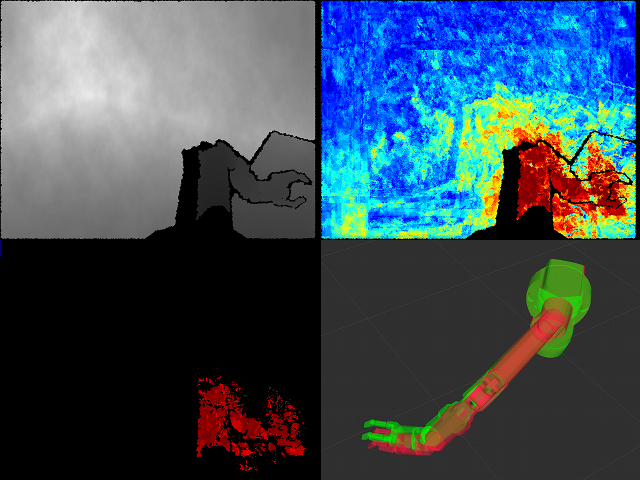
To achieve accurate vision-based control with a robotic arm, a good hand-eye coordination is required. However, knowing the current configuration of the arm can be very difficult due to noisy readings from joint encoders or an inaccurate hand-eye calibration. We propose an approach for robot arm pose estimation that uses depth images of the arm as input to directly estimate angular joint positions. This is a frame-by-frame method which does not rely on good initialisation of the solution from the previous frames or knowledge from the joint encoders. For estimation, we employ a random regression forest which is trained on synthetically generated data. We compare different training objectives of the forest and also analyse the influence of prior segmentation of the arms on accuracy. We show that this approach improves previous work both in terms of computational complexity and accuracy. Despite being trained on synthetic data only, we demonstrate that the estimation also works on real depth images.
| Author(s): | Widmaier, Felix and Kappler, Daniel and Schaal, Stefan and Bohg, Jeannette |
| Book Title: | Proceedings of the IEEE International Conference on Robotics and Automation (ICRA) 2016 |
| Year: | 2016 |
| Month: | May |
| Day: | 16-21 |
| Publisher: | IEEE |
| Department(s): | Autonomous Motion |
| Research Project(s): |
Robot Arm Pose Estimation as a Learning Problem
|
| Bibtex Type: | Conference Paper (inproceedings) |
| Paper Type: | Conference |
| DOI: | 10.1109/ICRA.2016.7487185 |
| Event Name: | IEEE International Conference on Robotics and Automation |
| Event Place: | Stockholm, Sweden |
| State: | Published |
| Attachments: |
pdf
|
|
BibTex @inproceedings{felix_ICRA_2016,
title = {Robot Arm Pose Estimation by Pixel-wise Regression of Joint Angles},
author = {Widmaier, Felix and Kappler, Daniel and Schaal, Stefan and Bohg, Jeannette},
booktitle = {Proceedings of the IEEE International Conference on Robotics and Automation (ICRA) 2016},
publisher = {IEEE},
month = may,
year = {2016},
doi = {10.1109/ICRA.2016.7487185},
month_numeric = {5}
}
|
|