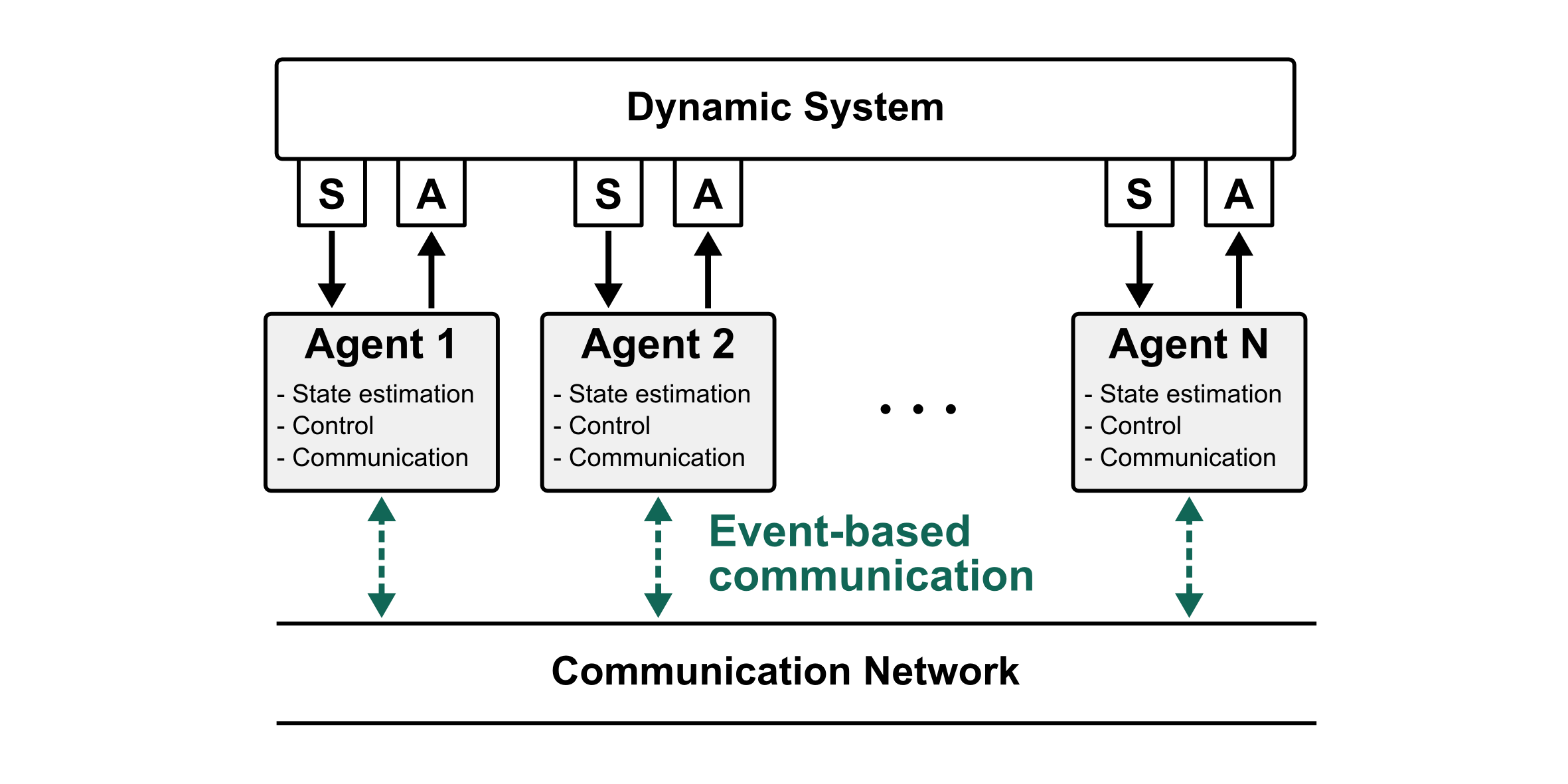
Abstraction of a networked control system. Multiple autonomous agents are connected to a dynamic system through sensors (S) and actuators (A), and they coordinate their actions by communicating over a network. This can represent autonomous vehicles driving in formation or robots working together on a task, for example. Event-based communication ensures that data is exchanged only when necessary to avoid overload of the network.
Future intelligent systems such as autonomous robots, self-driving cars, or manufacturing systems will be connected over communication networks. Facilitated by the network, the individual agents can coordinate their actions and thus achieve functionality exceeding the individual unit (for example, driving in formation or collaboratively manipulating an object).
While networks are convenient as they allow for a flexible exchange of data between various components, communication must be managed in order to avoid overload of the network with too much data. We have developed event-based control and estimation algorithms, where data is communicated only when necessary. Instead of transmitting data periodically at fixed times, as is the case in most traditional control systems, data is sent only when certain events indicate the need for new data. This way, communication and other resources (e.g. battery power of a wireless sensor) can be saved.
A particular focus of our work has been on event-based methods for distributed state estimation [ ]. For a system as shown in the figure above, the agents solve a joint estimation problem while exchanging data only when necessary to achieve a certain estimation quality (such as bounded error or variance). The key idea of our approach is to exploit system knowledge in the form of dynamics models allowing the agents to make predictions about their peers’ measurements and, this way, avoiding some of the communication of sensor data.
With the research in this project, we contribute to building up a theoretical framework for estimation and control under limited communication. In addition to theoretical contributions, we have also applied the developed algorithms on physical systems such as the Balancing Cube testbed [ ] and the humanoid robot Apollo. We are also investigating the scenario of remote operation with limited communication of (semi-) autonomous robots [ ], which is relevant in disaster response, for example.