2020
Marco, A., Rohr, A. V., Baumann, D., Hernández-Lobato, J. M., Trimpe, S.
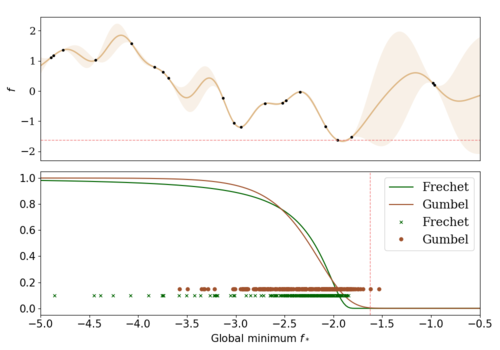
Excursion Search for Constrained Bayesian Optimization under a Limited Budget of Failures
2020 (proceedings) In revision

2016
Ebner, S., Trimpe, S.
Supplemental material for ’Communication Rate Analysis for Event-based State Estimation’
Max Planck Institute for Intelligent Systems, January 2016 (techreport)
2015
Trimpe, S.
Distributed Event-based State Estimation
Max Planck Institute for Intelligent Systems, November 2015 (techreport)
2014
Kalakrishnan, M.
Learning objective functions for autonomous motion generation
University of Southern California, University of Southern California, Los Angeles, CA, 2014 (phdthesis)
Pastor, P.
Data-driven autonomous manipulation
University of Southern California, University of Southern California, Los Angeles, CA, 2014 (phdthesis)
2013
Sankaran, B., Ghazvininejad, M., He, X., Kale, D., Cohen, L.
Learning and Optimization with Submodular Functions
ArXiv, May 2013 (techreport)
Trimpe, S.
Distributed and Event-based State Estimation and Control
ETH Zurich, 2013 (phdthesis)
2012
2011
Bohg, J.
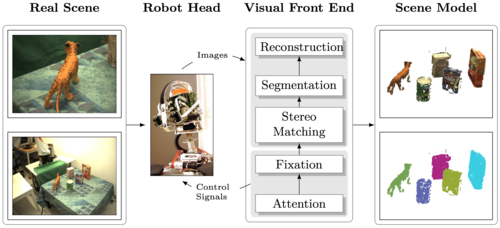
Multi-Modal Scene Understanding for Robotic Grasping
(2011:17):vi, 194, Trita-CSC-A, KTH Royal Institute of Technology, KTH, Computer Vision and Active Perception, CVAP, Centre for Autonomous Systems, CAS, KTH, Centre for Autonomous Systems, CAS, December 2011 (phdthesis)
Theodorou, E. A.
Iterative path integral stochastic optimal control: Theory and applications to motor control
University of Southern California, University of Southern California, Los Angeles, CA, 2011 (phdthesis)
2009
Ting, J.
Bayesian Methods for Autonomous Learning Systems (Phd Thesis)
Department of Computer Science, University of Southern California, Los Angeles, CA, 2009, clmc (phdthesis)
Schaal, S.
The SL simulation and real-time control software package
University of Southern California, Los Angeles, CA, 2009, clmc (techreport)
Schaal, S.
The SL simulation and real-time control software package
University of Southern California, Los Angeles, CA, 2009, clmc (techreport)
2008
Tevatia, G., Schaal, S.
Efficient inverse kinematics algorithms for highdimensional movement systems
CLMC Technical Report: TR-CLMC-2008-1, 2008, clmc (techreport)
2007
Peters, J.
Machine Learning of Motor Skills for Robotics
University of Southern California, Los Angeles, CA, USA, University of Southern California, Los Angeles, CA, USA, 2007, clmc (phdthesis)
Peters, J.
Relative Entropy Policy Search
CLMC Technical Report: TR-CLMC-2007-2, Computational Learning and Motor Control Lab, Los Angeles, CA, 2007, clmc (techreport)
Ting, J., Theodorou, E., Schaal, S.
Learning an Outlier-Robust Kalman Filter
CLMC Technical Report: TR-CLMC-2007-1, Los Angeles, CA, 2007, clmc (techreport)
2006
Theodorou, E.
Statistical Learning of LQG controllers
Technical Report-2006-1, Computational Action and Vision Lab University of Minnesota, 2006, clmc (techreport)
2005
Theodorou, E.
Linear and Nonlinear Estimation models applied to Hemodynamic Model
Technical Report-2005-1, Computational Action and Vision Lab University of Minnesota, 2005, clmc (techreport)
2004
D’Souza, A
Towards Tractable Parameter-Free Statistical Learning (Phd Thesis)
Department of Computer Science, University of Southern California, Los Angeles, 2004, clmc (phdthesis)
1992
Schaal, S.
Integrierte Wissensverarbeitung mit CAD am Beispiel der konstruktionsbegleitenden Kalkulation (Ways to smarter CAD Systems)
Hanser 1992. (Konstruktionstechnik München Band 8). Zugl. München: TU Diss., München, 1992, clmc (book)