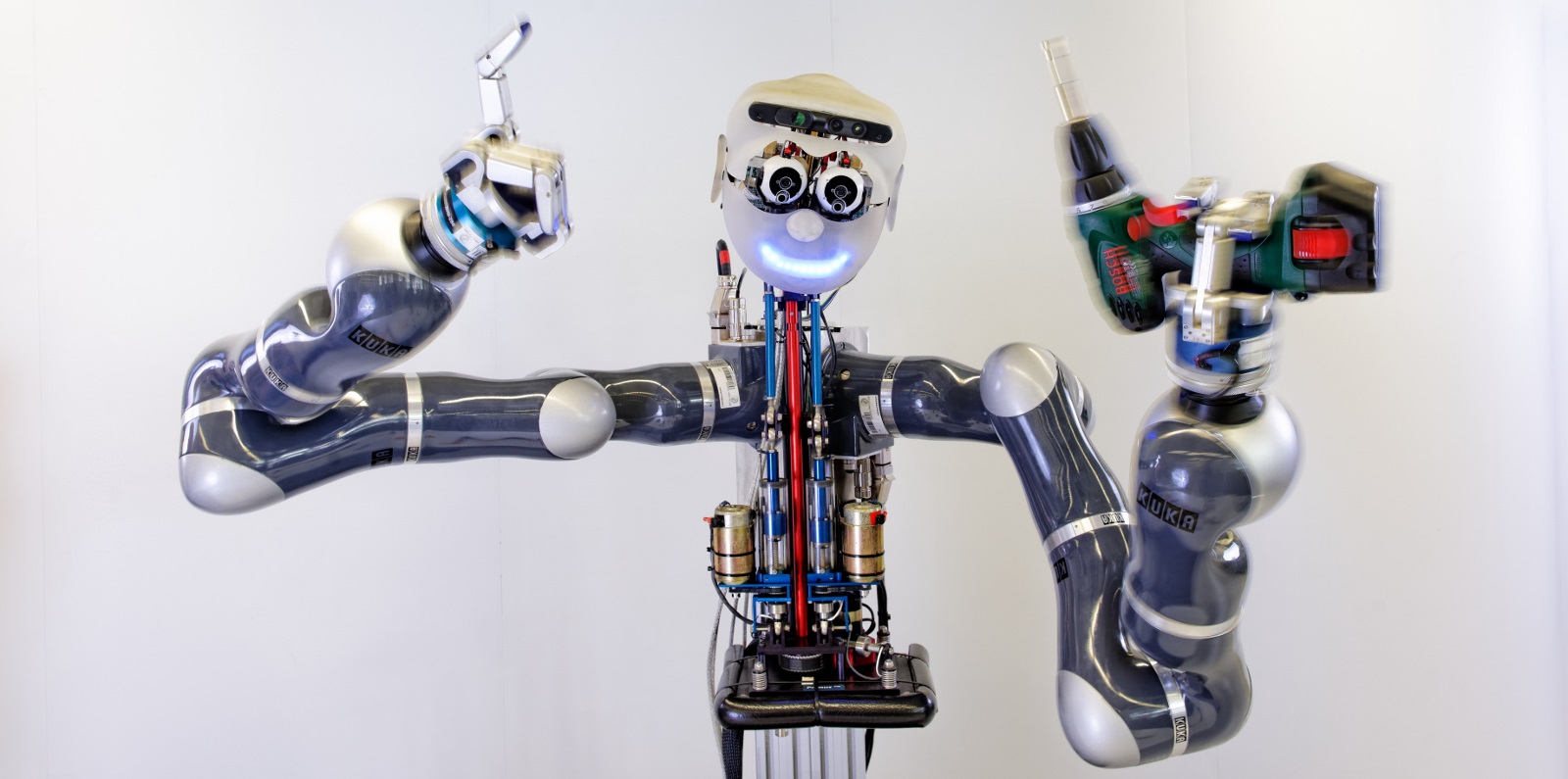
The humanoid robot Apollo is one of the robotic platforms used for research at the Autonomous Motion Department. (Photo: Wolfram Scheible)
In addition to fundamental theoretical research, the Autonomous Motion Department emphasizes experiments with actual systems, in particular anthropomophic and humanoid robots. Two main platforms in use for research are Apollo, a dual-arm manipulation platform, and Athena, a complete humanoid robot.
The synthesis of autonomous systems on actual robots requires addressing the real physics of the system, complex and unknown nonlinearities, and it is not possible to bypass some issues as often done in simulation studies. In the past, we realized that investigations by synthesis add enormous value to the research program, as they create novel questions and focus research attention to what is actually relevant.
One of the department's state-of-the-art robots is called Apollo (shown on the above photo). Apollo is a dual-arm manipulation platform used to study active perception, grasping, and manipulation with two arms, hands with tactile sensors, and an active vision head. For example, we investigate how to manipulate arbitrary objects in the workspace of the robot, how to automatically learn about the environment, learn from demonstration, achieve skill from trial an error learning, etc. In future, we envision that the robot learns to entirely self-calibrate, learns about objects in the environment by active perception, and finally learns manipulation tasks from interaction with a human teacher and machine learning techniques. The hope is that eventually the system will acquire a growing repertoire of manipulation tasks, which also generalize to new situations.
An even more challenging experimental setup is a full humanoid robot in a complex environment. Athena (see tab "Robots") is such a robot, which could accomplish tasks in outdoors environments, for example. We have been developing this robot with the US-based company Sarcos. Athena has recently arrived at the Autonomous Motion Department and will be a focus of our research for the years to come. We envision creating a lab environment that mimics interesting outdoors scenarios, and study how to accomplish complete task in such environments, including biped walking over rough terrain, climbing over obstacles, and manipulation of the environment.
Find more robots and experimental equipment supporting our research from the pages "Robots" and "Equipment."





















