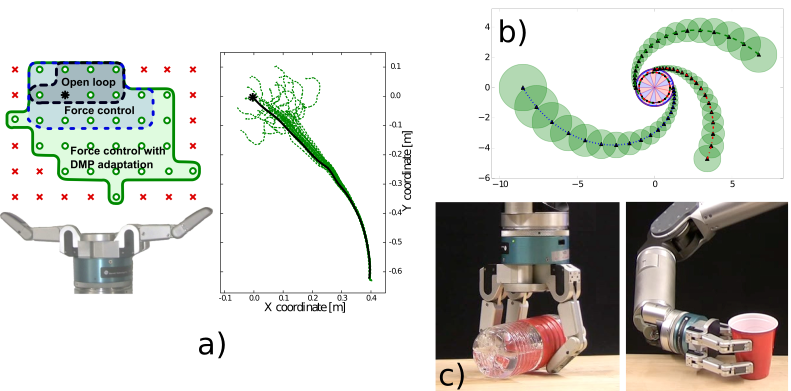
a) results of online adaptation with reactive DMPs for grasping experiments show increase region of robustness b) periodic motion and its transients encoded as a dynamical system and c) examples of manipulation experiments using reactive DMPs.
An important part of our research is concerned with the problem of movement representations. The way motion and contacts are represented is crucial to derive efficient planning and control algorithms, for example by significantly simplifying the underlying optimization problems. The way sensory information can be integrated to generate very reactive behavior is also dependent on the chosen representation. For example representing a motion as the solution of a differential equation, as it is done with Central Pattern Generators (CPGs) or Dynamic Movement Primitives (DMPs), allows one to directly include sensory feedback to the planned trajectory. Good representations are certainly not unique and different tasks and contexts require different types of representations to optimize the capabilities of the system. This becomes a crucial component when dealing with high dimensional sensory information and redundancy, like in a humanoid robot.
In our earlier work, we have explored movement representations for legged locomotion, where we used CPGs as an efficient representation to integrate sensory information into trajectory generation [ ]. More recently, we have explored the problem of generating reactive behaviors during manipulation tasks. We have shown how the use of movement primitives in conjunction with local sensory models acquired from experience could create very reactive behaviors [ ]. This research is connected to the the idea of associative skill memories, but looks at the problem from a feedback control point of view. We have also extended representations for rhythmic movements based on DMPs such that they can also encode transcient behaviors in limit cycle systems [ ]. These representations are useful as they not only encode the rhythmic motion but also the "way to transition to the rhythmic motion".