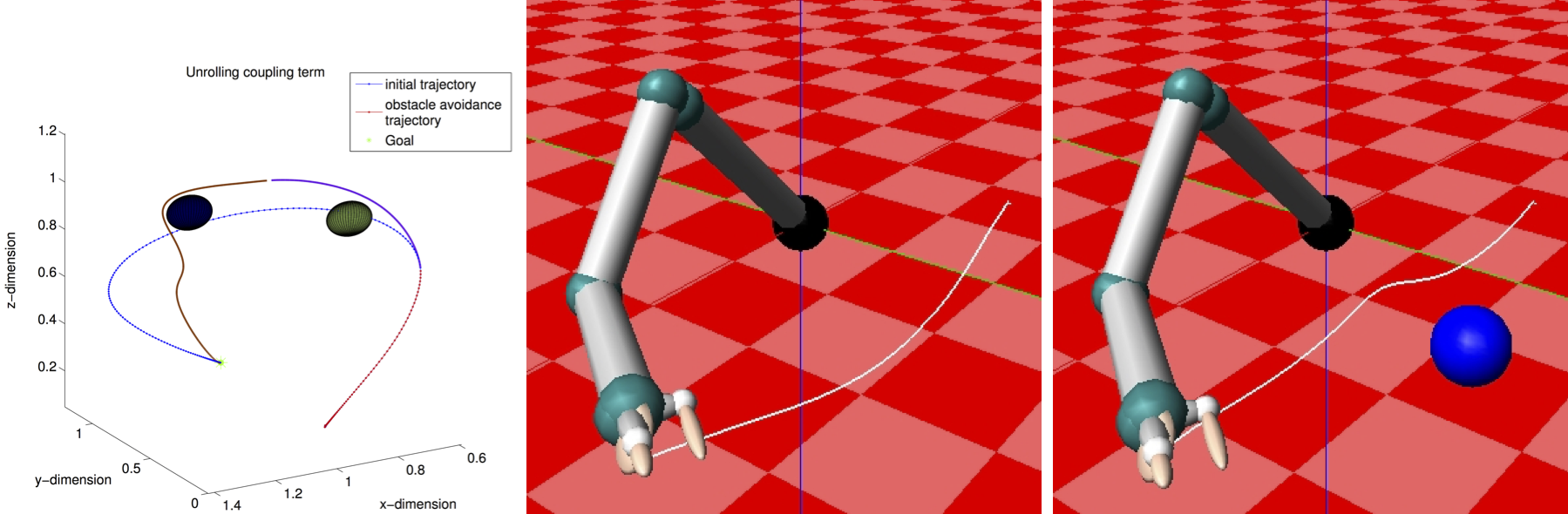
(left) Illustration of unrolling a movement primitive trajectory with and without coupling term in the presence of multiple obstacles. (middle) Simulation of the Sarcos Master Arm executing a movement primitive without obstacle close by. (right) Simulation of the same movement primitive with learned coupling term which is activated by a nearby obstacle.
In order to perform well in day to day tasks, humanoid robots need to be able to adapt to the changes in their work environments. In response to a change in the environment, the robot can pursue at least two different strategies: First, it could re-plan, a process that is often computationally expensive and time consuming, such that rapid reactions are hard to accomplish. Alternatively, the robot could try to modify its on-going control policy with reactive strategies, which are usually very fast to compute, but suboptimal.
In this research project, we employ a reactive strategy by modifying an online control policy in the form of Dynamic Movement Primitives (DMPs) when changes in the environment occur, starting with the presence/absence of obstacles in the robot’s work environment. We envision to achieve this online modification of the movement primitive using nonlinear terms - called coupling terms - which modify the originally planned trajectory in the presence of an obstacle, and remain dormant otherwise.
Towards this goal we investigate
- How to design or learn appropriate features that can generate sufficiently powerful coupling terms for tasks like obstacle avoidance [ ] .
- How to generalize the coupling term to go beyond obstacle avoidance, such that avoidance of joint-angle limits, force control on contact, bi-manual task coordination, etc., can become part of reactive feedback control.