2022
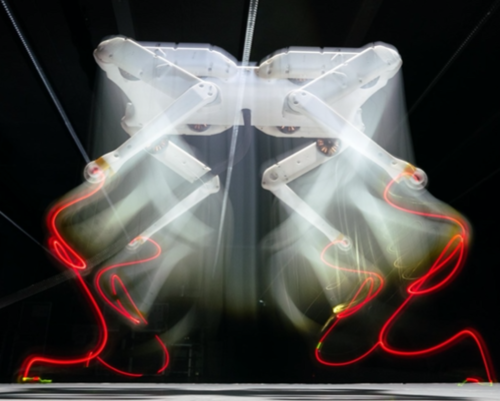
Büchler, D., Guist, S., Calandra, R., Berenz, V., Schölkopf, B., Peters, J.
Learning to Play Table Tennis From Scratch using Muscular Robots
IEEE Transactions on Robotics (T-RO), 38(6):3850-3860, 2022 (article)
2021
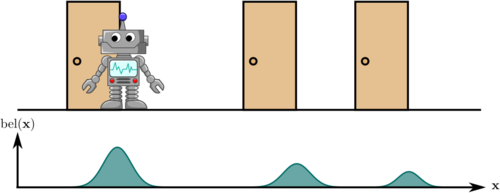
Kloss, A., Martius, G., Bohg, J.
How to Train Your Differentiable Filter
Autonomous Robots, 45(4):561-578, Springer, June 2021 (article)
2020
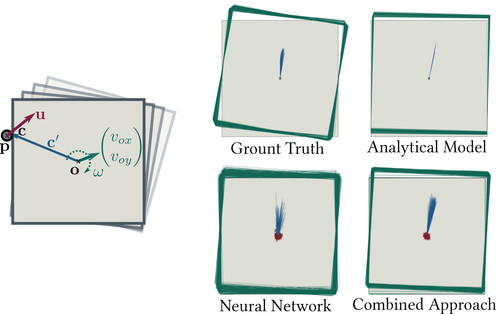
Kloss, A., Schaal, S., Bohg, J.
Combining learned and analytical models for predicting action effects from sensory data
International Journal of Robotics Research, September 2020 (article)
Grimminger, F., Meduri, A., Khadiv, M., Viereck, J., Wüthrich, M., Naveau, M., Berenz, V., Heim, S., Widmaier, F., Flayols, T., Fiene, J., Badri-Spröwitz, A., Righetti, L.
An Open Torque-Controlled Modular Robot Architecture for Legged Locomotion Research
IEEE Robotics and Automation Letters, 5(2):3650-3657, IEEE, April 2020 (article)
Nubert, J., Koehler, J., Berenz, V., Allgower, F., Trimpe, S.
Safe and Fast Tracking on a Robot Manipulator: Robust MPC and Neural Network Control
IEEE Robotics and Automation Letters, 5(2):3050-3057, 2020 (article)

2019
Arslan, Ö.
Statistical Coverage Control of Mobile Sensor Networks
IEEE Transactions on Robotics, 35(4):889-908, 2019 (article)

2018
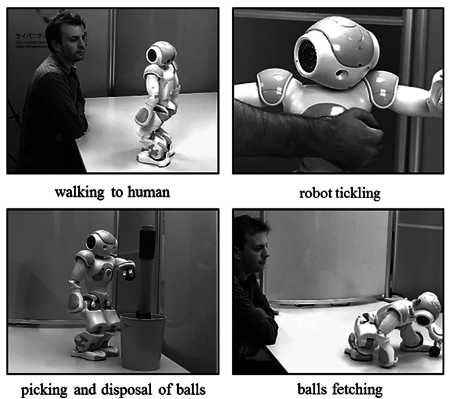
Anderson, M., Anderson, S., Berenz, V.
A Value-Driven Eldercare Robot: Virtual and Physical Instantiations of a Case-Supported Principle-Based Behavior Paradigm
Proceedings of the IEEE, pages: 1,15, October 2018 (article)
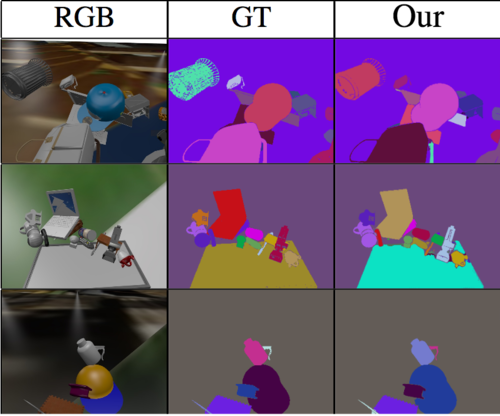
Shao, L., Tian, Y., Bohg, J.
ClusterNet: Instance Segmentation in RGB-D Images
arXiv, September 2018, Submitted to ICRA'19 (article) Submitted
Berenz, V., Schaal, S.
Playful: Reactive Programming for Orchestrating Robotic Behavior
IEEE Robotics Automation Magazine, 25(3):49-60, September 2018 (article) In press
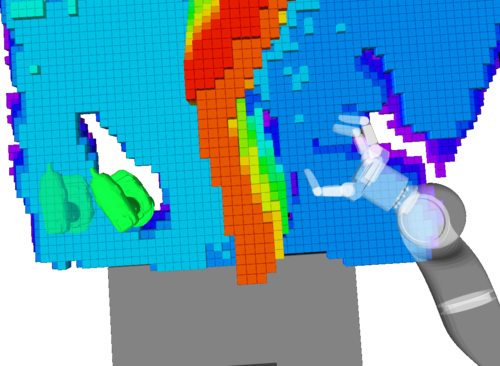
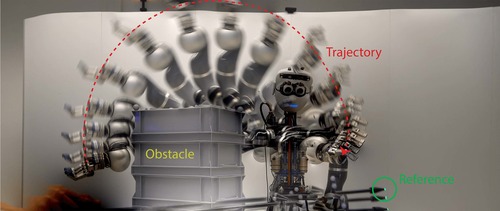
Kappler, D., Meier, F., Issac, J., Mainprice, J., Garcia Cifuentes, C., Wüthrich, M., Berenz, V., Schaal, S., Ratliff, N., Bohg, J.
Real-time Perception meets Reactive Motion Generation
IEEE Robotics and Automation Letters, 3(3):1864-1871, July 2018 (article)
Muehlebach, M., Trimpe, S.
Distributed Event-Based State Estimation for Networked Systems: An LMI Approach
IEEE Transactions on Automatic Control, 63(1):269-276, January 2018 (article)
Ascoli, A., Baumann, D., Tetzlaff, R., Chua, L. O., Hild, M.
Memristor-enhanced humanoid robot control system–Part I: theory behind the novel memcomputing paradigm
International Journal of Circuit Theory and Applications, 46(1):155-183, 2018 (article)
Baumann, D., Ascoli, A., Tetzlaff, R., Chua, L. O., Hild, M.
Memristor-enhanced humanoid robot control system–Part II: circuit theoretic model and performance analysis
International Journal of Circuit Theory and Applications, 46(1):184-220, 2018 (article)
2017
Bohg, J., Hausman, K., Sankaran, B., Brock, O., Kragic, D., Schaal, S., Sukhatme, G.
Interactive Perception: Leveraging Action in Perception and Perception in Action
IEEE Transactions on Robotics, 33, pages: 1273-1291, December 2017 (article)
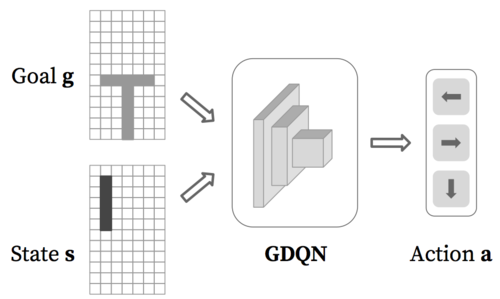
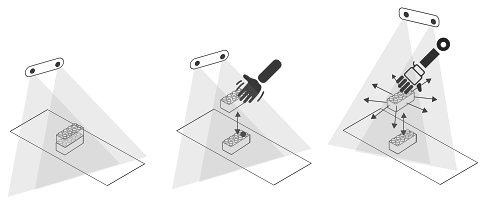
Li, W., Bohg, J., Fritz, M.
Acquiring Target Stacking Skills by Goal-Parameterized Deep Reinforcement Learning
arXiv, November 2017 (article) Submitted
Trimpe, S.
Event-based State Estimation: An Emulation-based Approach
IET Control Theory & Applications, 11(11):1684-1693, July 2017 (article)
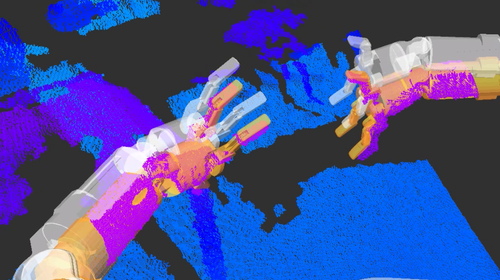
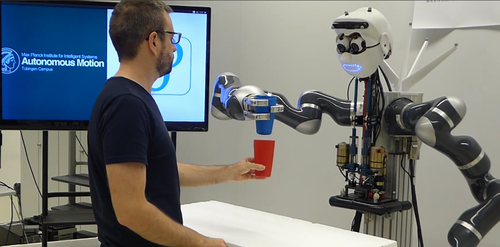
Garcia Cifuentes, C., Issac, J., Wüthrich, M., Schaal, S., Bohg, J.
Probabilistic Articulated Real-Time Tracking for Robot Manipulation
IEEE Robotics and Automation Letters (RA-L), 2(2):577-584, April 2017 (article)
Wang, Z., Boularias, A., Mülling, K., Schölkopf, B., Peters, J.
Anticipatory Action Selection for Human-Robot Table Tennis
Artificial Intelligence, 247, pages: 399-414, 2017, Special Issue on AI and Robotics (article)
Peters, J., Lee, D., Kober, J., Nguyen-Tuong, D., Bagnell, J., Schaal, S.
Robot Learning
In Springer Handbook of Robotics, pages: 357-394, 15, 2nd, (Editors: Siciliano, Bruno and Khatib, Oussama), Springer International Publishing, 2017 (inbook)
2016
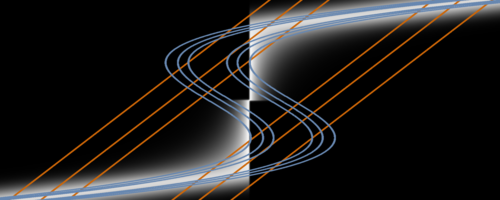
Wüthrich, M., Trimpe, S., Garcia Cifuentes, C., Kappler, D., Schaal, S.
A New Perspective and Extension of the Gaussian Filter
The International Journal of Robotics Research, 35(14):1731-1749, December 2016 (article)
Ratliff, N., Meier, F., Kappler, D., Schaal, S.
DOOMED: Direct Online Optimization of Modeling Errors in Dynamics
arXiv preprint arXiv:1608.00309, August 2016 (article)

Dominey, P. F., Prescott, T. J., Bohg, J., Engel, A. K., Gallagher, S., Heed, T., Hoffmann, M., Knoblich, G., Prinz, W., Schwartz, A.
Implications of Action-Oriented Paradigm Shifts in Cognitive Science
In The Pragmatic Turn - Toward Action-Oriented Views in Cognitive Science, 18, pages: 333-356, 20, Strüngmann Forum Reports, vol. 18, J. Lupp, series editor, (Editors: Andreas K. Engel and Karl J. Friston and Danica Kragic), The MIT Press, 18th Ernst Strüngmann Forum, May 2016 (incollection) In press
Bohg, J., Kragic, D.
Learning Action-Perception Cycles in Robotics: A Question of Representations and Embodiment
In The Pragmatic Turn - Toward Action-Oriented Views in Cognitive Science, 18, pages: 309-320, 18, Strüngmann Forum Reports, vol. 18, J. Lupp, series editor, (Editors: Andreas K. Engel and Karl J. Friston and Danica Kragic), The MIT Press, 18th Ernst Strüngmann Forum, May 2016 (incollection) In press
Daniel, C., van Hoof, H., Peters, J., Neumann, G.
Probabilistic Inference for Determining Options in Reinforcement Learning
Machine Learning, Special Issue, 104(2):337-357, (Editors: Gärtner, T., Nanni, M., Passerini, A. and Robardet, C.), European Conference on Machine Learning im Machine Learning, Journal Track, 2016, Best Student Paper Award of ECML-PKDD 2016 (article)
Ting, J., Meier, F., Vijayakumar, S., Schaal, S.
Locally Weighted Regression for Control
In Encyclopedia of Machine Learning and Data Mining, pages: 1-14, Springer US, Boston, MA, 2016 (inbook)
Laidig, D., Trimpe, S., Seel, T.
Event-based Sampling for Reducing Communication Load in Realtime Human Motion Analysis by Wireless Inertial Sensor Networks
Current Directions in Biomedical Engineering, 2(1):711-714, De Gruyter, 2016 (article)
Herzog, A., Rotella, N., Mason, S., Grimminger, F., Schaal, S., Righetti, L.
Momentum Control with Hierarchical Inverse Dynamics on a Torque-Controlled Humanoid
Autonomous Robots, 40(3):473-491, 2016 (article)
Vitiello, Nicola, Ijspeert, Auke J, Schaal, S.
Bioinspired Motor Control for Articulated Robots [From the Guest Editors]
IEEE Robotics {\&} Automation Magazine, 23(1):20-21, 2016 (article)
2015
Marco, A.
Gaussian Process Optimization for Self-Tuning Control
Polytechnic University of Catalonia (BarcelonaTech), October 2015 (mastersthesis)
Doerr, A.
Adaptive and Learning Concepts in Hydraulic Force Control
University of Stuttgart, September 2015 (mastersthesis)
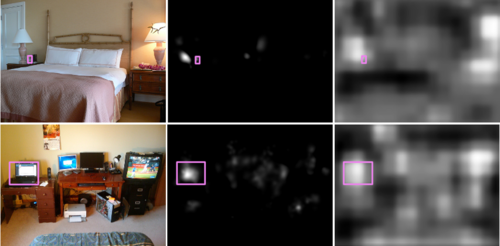
Kloss, A.
Object Detection Using Deep Learning - Learning where to search using visual attention
Eberhard Karls Universität Tübingen, May 2015 (mastersthesis)
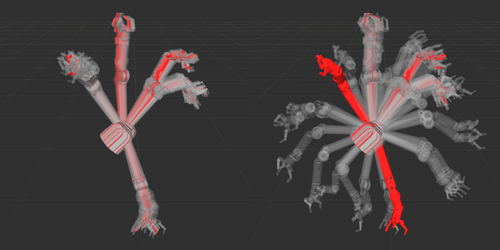
Widmaier, F.
Robot Arm Tracking with Random Decision Forests
Eberhard-Karls-Universität Tübingen, May 2015 (mastersthesis)
Trimpe, S.
Lernende Roboter
In Jahrbuch der Max-Planck-Gesellschaft, Max Planck Society, May 2015, (popular science article in German) (inbook)
Schaal, S.
Autonomous Robots
In Jahrbuch der Max-Planck-Gesellschaft, May 2015 (incollection)
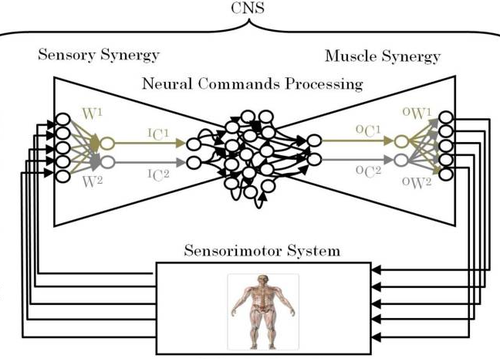
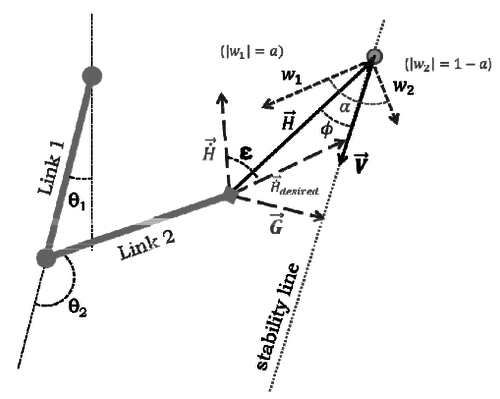
Alnajjar, F., Itkonen, M., Berenz, V., Tournier, M., Nagai, C., Shimoda, S.
Sensory synergy as environmental input integration
Frontiers in Neuroscience, 8, pages: 436, 2015 (article)
Daniel, C., Kroemer, O., Viering, M., Metz, J., Peters, J.
Active Reward Learning with a Novel Acquisition Function
Autonomous Robots, 39(3):389-405, 2015 (article)
Manschitz, S., Kober, J., Gienger, M., Peters, J.
Learning Movement Primitive Attractor Goals and Sequential Skills from Kinesthetic Demonstrations
Robotics and Autonomous Systems, 74, Part A, pages: 97-107, 2015 (article)
Calandra, R., Seyfarth, A., Peters, J., Deisenroth, M.
Bayesian Optimization for Learning Gaits under Uncertainty
Annals of Mathematics and Artificial Intelligence, pages: 1-19, 2015 (article)
Berenz, V., Alnajjar, F., Hayashibe, M., Shimoda, S.
Tacit Learning for Emergence of Task-Related Behaviour through Signal Accumulation
In Emergent Trends in Robotics and Intelligent Systems: Where is the Role of Intelligent Technologies in the Next Generation of Robots?, pages: 31-38, Springer International Publishing, Cham, 2015 (inbook)
Peters, J., Lee, D., Kober, J., Nguyen-Tuong, D., Bagnell, J. A., Schaal, S.
Robot Learning
In Springer Handbook of Robotics 2nd Edition, pages: 1371-1394, Springer Berlin Heidelberg, Berlin, Heidelberg, 2015 (incollection)
2014
Holger Kaden
Pole Balancing with Apollo
Eberhard Karls Universität Tübingen, December 2014 (mastersthesis)
Trimpe, S.
Wenn es was zu sagen gibt
Bild der Wissenschaft, pages: 20-23, November 2014, (popular science article in German) (article)
Floreano, Dario, Ijspeert, Auke Jan, Schaal, S.
Robotics and Neuroscience
Current Biology, 24(18):R910-R920, sep 2014 (article)
Rai, A.
Learning Coupling Terms for Obstacle Avoidance
École polytechnique fédérale de Lausanne, August 2014 (mastersthesis)
Issac, J.
Object Tracking in Depth Images Using Sigma Point Kalman Filters
Karlsruhe Institute of Technology, July 2014 (mastersthesis)

Atanasov, N., Sankaran, B., Le Ny, J., Pappas, G., Daniilidis, K.
Nonmyopic View Planning for Active Object Classification and Pose Estimation
IEEE Transactions on Robotics, May 2014, clmc (article)
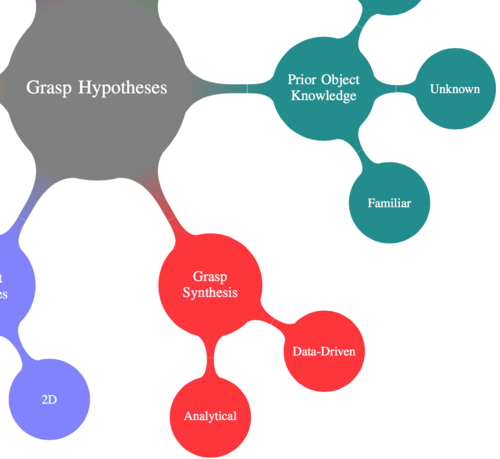
Bohg, J., Morales, A., Asfour, T., Kragic, D.
Data-Driven Grasp Synthesis - A Survey
IEEE Transactions on Robotics, 30, pages: 289 - 309, IEEE, April 2014 (article)
Meier, F., Hennig, P., Schaal, S.
Local Gaussian Regression
arXiv preprint, March 2014, clmc (misc)
Pfreundt, C.
Probabilistic Object Tracking on the GPU
Karlsruhe Institute of Technology, March 2014 (mastersthesis)
Berenz, V., Suzuki, K.
Targets-Drives-Means: A declarative approach to dynamic behavior specification with higher usability
Robotics and Autonomous Systems, 62(4):545-555, 2014 (article)